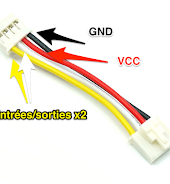
Les couleurs de câbles indiquent leur type.

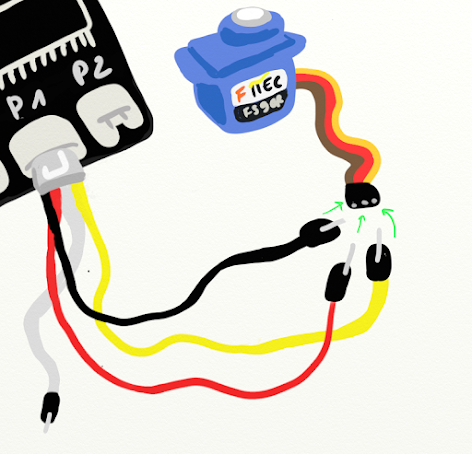
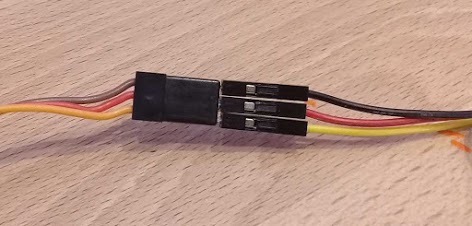
Pour certains composants tu auras besoin de câbles spéciaux :
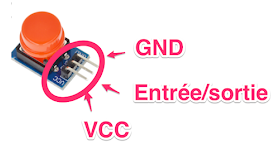
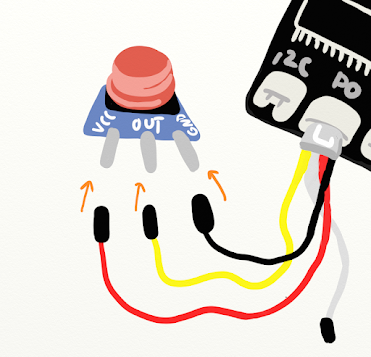
Pour ces composants tu peux lire les types d’entrées sorties sur le composant, sinon par couleur : noir avec noir (ou marron!), rouge avec rouge, etc.
On va connecter nos composants à notre shield Grove :


Pour brancher tes composants, tu peux utiliser les 3 ports entourés en bleu (P0/P14, P1/P15, P2/P16). Pour chaque port, tu as en réalité deux entrée/sorties ! Elles sont écrites en petit à côté du port.
Tu peux utiliser des pinces crocodiles avec les autres ports sur les côtés de la carte (GND, P8, P12, P13, 3V3, P0, P1, P2).
On ne va pas utiliser le port I2C.












 Le potentiomètre prends des valeurs comprises entre 0 et 1024
Le potentiomètre prends des valeurs comprises entre 0 et 1024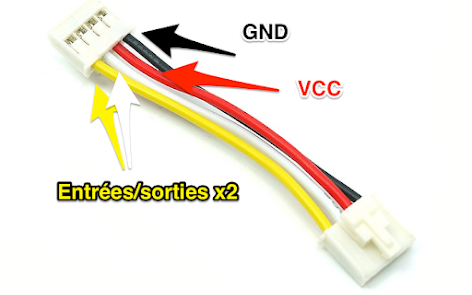
 -Un servomoteur “classique” ne peut faire qu’un demi-tour, c’est à dire tourner entre 0 et 180°.
-Un servomoteur “classique” ne peut faire qu’un demi-tour, c’est à dire tourner entre 0 et 180°.