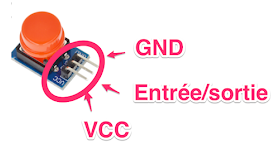
Le capteur de distance & ses branchements
 Un capteur de distance (ultrasons) envoie un signal, puis mesure le temps que le signal met à revenir. Plus le temps est long plus la distance est grande.
Un capteur de distance (ultrasons) envoie un signal, puis mesure le temps que le signal met à revenir. Plus le temps est long plus la distance est grande.
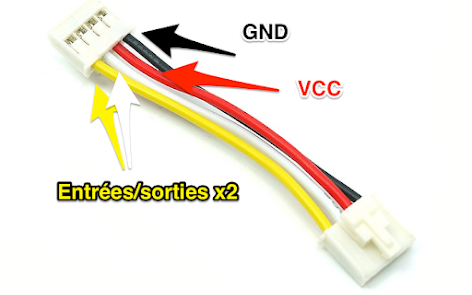
L’envoi du signal correspond à la broche ECHO (le capteur émet un “echo”), la broche TRIG déclenche la mesure, elle correspond à l’arrivée du signal.
Plage de mesure : de 2cm à 4 m !
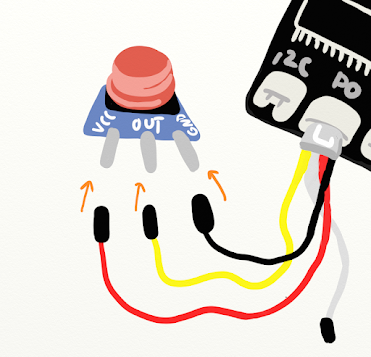
Tu peux brancher un capteur de distance Grove avec un câble Grove classique ! Tu as juste à le clipser à la broche P que tu souhaites !
Le capteur de distance & sa programmation en Python
On commence par importer la librairie : GroveUltrasonicRanger
from grove.grove_ultrasonic_ranger import GroveUltrasonicRanger
On va ensuite définir le port sur lequel le capteur est branché et définir une variable pour manipuler notre capteur. Par exemple :
pin_capteur = 12
capteur = GroveUltrasonicRanger(pin_capteur)
On peut maintenant utiliser la commande get_distance() pour récupérer la valeur du capteur :
print(capteur.get_distance())
Pense à marquer une pause pour pouvoir lire plus facilement les valeurs si tu les affiches dans une boucle ‘toujours’ par exemple !










 Tous nos composants vont être reliés à la carte par des cables.
Tous nos composants vont être reliés à la carte par des cables.




 -> Un servomoteur “classique” ne peut faire qu’un demi-tour, c’est à dire tourner entre 0 et 180°.
-> Un servomoteur “classique” ne peut faire qu’un demi-tour, c’est à dire tourner entre 0 et 180°.
