Le capteur de distance & ses blocs
 Un capteur de distance (ultrasons) envoie un signal, puis mesure le temps que le signal met à revenir. Plus le temps est long plus la distance est grande.
Un capteur de distance (ultrasons) envoie un signal, puis mesure le temps que le signal met à revenir. Plus le temps est long plus la distance est grande.
L’envoi du signal correspond à la broche ECHO (le capteur émet un “echo”), la broche TRIG déclenche la mesure, elle correspond à l’arrivée du signal.
Plage de mesure : de 2cm à 4 m !

Pour utiliser le bloc 'Ultrasonic Sensor', il faut d'abord importer l'extension 'Grove' ! Il faut écrire le nom de l'extension pour la trouver !
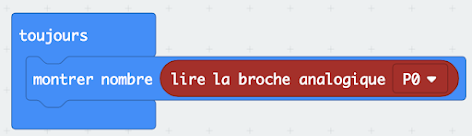
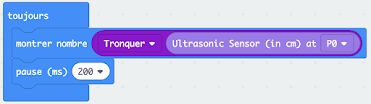 Tips : Pour comprendre comment le capteur fonctionne, commence par afficher ses valeurs comme suit :
Tips : Pour comprendre comment le capteur fonctionne, commence par afficher ses valeurs comme suit :
Le bloc 'tronquer' permet de ne garder que le nombre entier et ne pas afficher les décimales ! Tu trouveras ce bloc dans la catégorie 'Maths'.
On marque aussi une pause pour pouvoir lire plus facilement les valeurs !
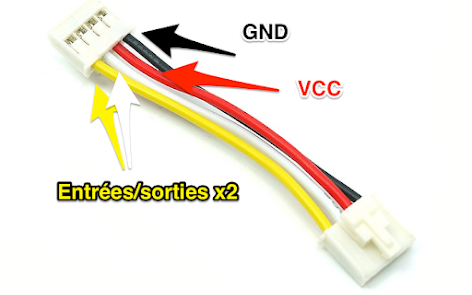
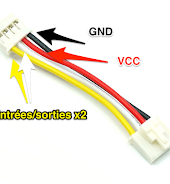
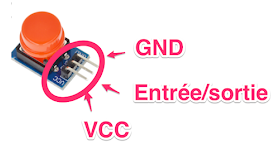
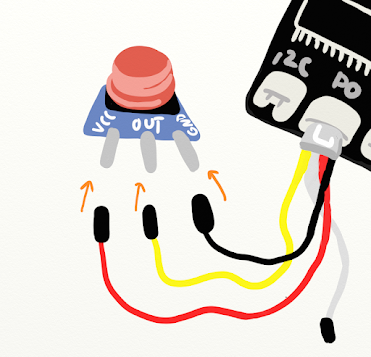
Le capteur de distance & ses branchements
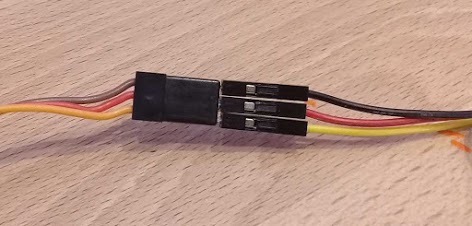
Tu peux brancher un capteur de distance Grove avec un câble Grove classique ! Tu as juste à le clipser à la broche P que tu souhaites !
















 –Un servomoteur “classique” ne peut faire qu’un demi-tour, c’est à dire tourner entre 0 et 180°.
–Un servomoteur “classique” ne peut faire qu’un demi-tour, c’est à dire tourner entre 0 et 180°.

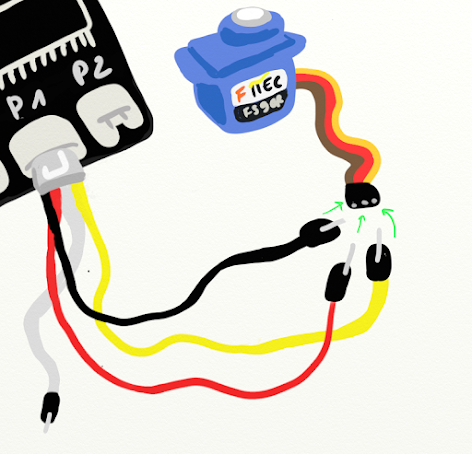
 Pour ce composant, on va utiliser le bloc :
Pour ce composant, on va utiliser le bloc :